
こんにちは。マーケティングGの野崎です。
来週は「国際ロボット展」(東京)と「ITソリューションフェア大阪」(大阪)があります。Demo3Dで何か分からないことがあれば展示会に来て頂けるとその場にてご説明させて頂けますので、是非ご来場ください。
今回は同時期の開催にになりますので、私はITソリューションフェア大阪に参加させて頂きます。プライベート展示会につき、弊社から招待状の配布は行っておりませんが、VRの展示を行いますのでご興味のある方はご来場ください。
Demo3Dに関するお問い合わせの一つとして、「QLPの出し方が分からない」というものがあります。
なので今回はQLPの出し方について解説していきたいと思います。
まず、QLPについてご説明します。
QLPとは
Quick Logic Procedureの略でブロックを組み合わせるようにロジックを作成することが出来るビジュアル的なユーザインタフェース(UI)。ロジカルシンキング(論理的思考)が出来れば言語の壁は低く、比較的簡単にカスタマイズを行うことが出来る。
解説するなら上記のような感じでしょうか。
実はこの機能、Demo3D製造メーカーであるEmulate3D社のディレクターの一人であるデイブ・ドーキンスさんが考案したのですが、マサチューセッツ工科大学が作った「子供を対象とした教育用プログラミングソフト」からアイデアを得て設計したらしいです。
教育用ソフトからアイデアを得ていることからも分かる通り、あまりプログラミングに慣れていない方でも簡単にロジックを組むことが出来ます。
トランスファープロトコル
Demo3Dの基本概念として(TransferProtcol:トランスファープロトコル)というものがあります。これは、ロードの搬送する時に利用するコネクタを作る上で必要になったものです。
動きは大きく3つに分かれ、
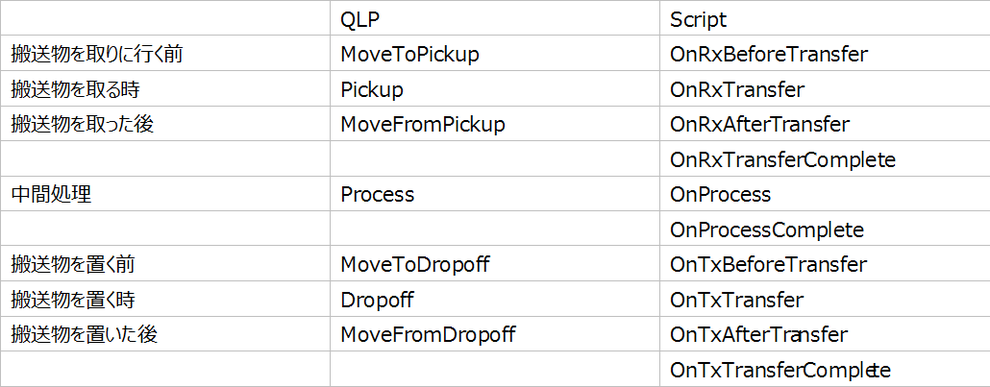
搬送物を取りに行く「Pickup」と、搬送物を置きに行く「Dropoff」、そしてその間にある「Process」です。
また、PickupとDropoffは更に細かく3つに細分化されており、
搬送物を取りに行く前「MoveToPickup」、
搬送物を取る「Pickup」、
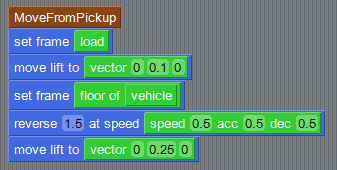
搬送物を取った後「MoveFromPickup」、
搬送物を置きに行く前「MoveToDropoff」、
搬送物を置く「Dropoff」、
搬送物を置いた後「MoveFromDropoff」です。
今回の記事のQLPからは少し話題が逸れますが、スクリプトではトランスファーの名前が変わるということと、QLPのトランスファーにプラスしてコンプリート(OnRxTransferComplete/OnProcessComplete/OnTxTransferComplete)がありますのでご注意ください。
何故、トランスファープロトコルの話をしたかというと、これはQLPを書く(開く)上で必要になる前提知識だからです。
トランスファープロトコルは知っているけれど、どこに利用されているのか知らないと、使われている実感がありませんよね。
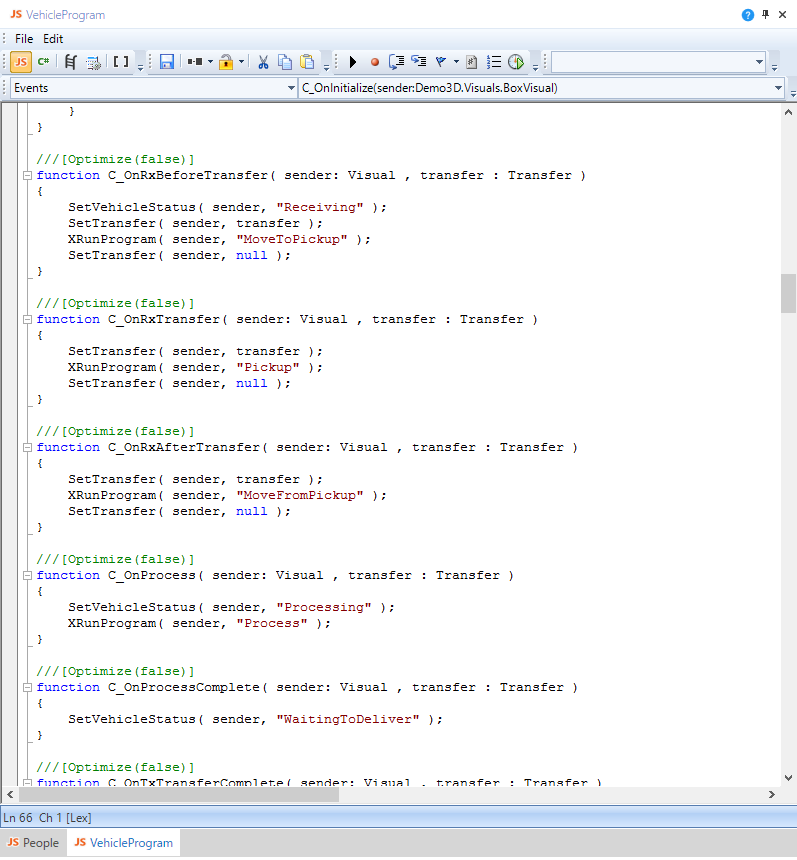
これらはDemo3Dのコネクタを接続して動作する処理全てに組み込まれており、スクリプトやQLPに記述されています。
QLPの開き方
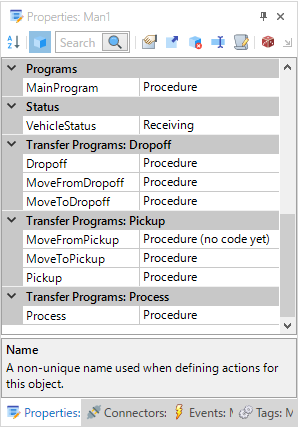
作りたい動作がどのトランスファープロトコルの領域なのかが分かりましたら、プロパティウィンドウから開く事が出来ます。大抵の場合はシンプルプロパティに含まれております。見つからない場合は検索ボックスにトランスファープロトコル名を入力しましょう。
見つかったらプロパティを選択後に「…」をクリックすると開きます。
見つからない場合:目的のプロパティが検索しても出てこない場合の対処法
次回の火曜は「閉じてしまったウィンドウの復活方法」です。





コメントをお書きください