
2017/11/21
こんにちは。マーケティングGの野崎です。 来週は「国際ロボット展」(東京)と「ITソリューションフェア大阪」(大阪)があります。Demo3Dで何か分からないことがあれば展示会に来て頂けるとその場にてご説明させて頂けますので、是非ご来場ください。...
2017/11/09
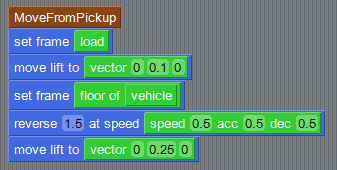
こんにちは。維持保守Gの中村です。先週の予告通り今日は「作業者から作業者への荷物の手渡し」について説明します。 Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで荷物の搬送ができることを説明してきました。 それは標準で動作するように設定がされているからですが、時には標準通りの動きではダメな場合があります。...
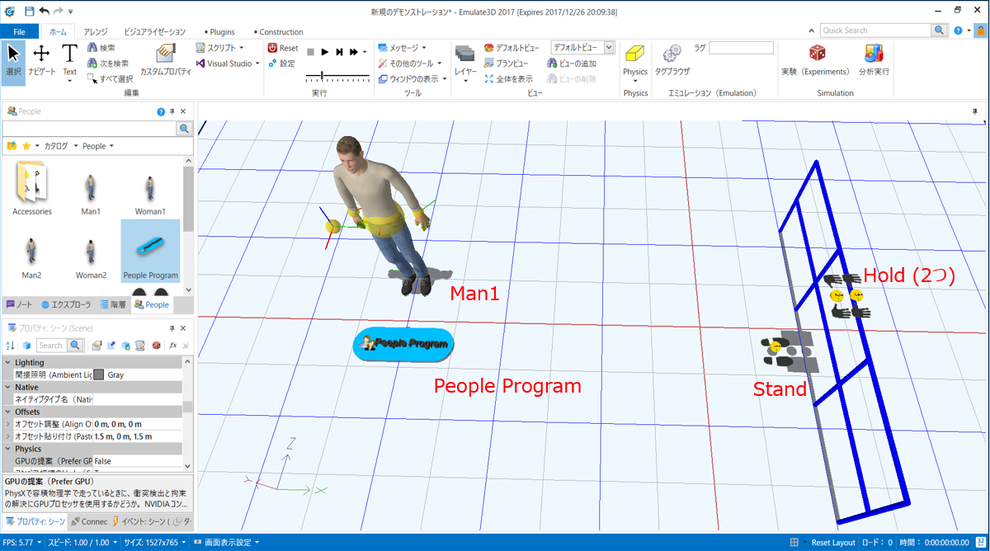
2017/11/02
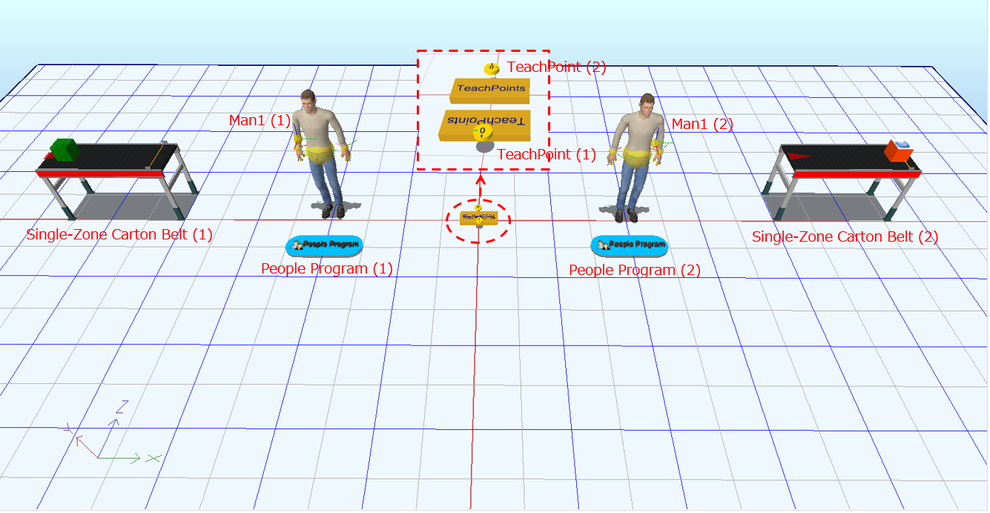
こんにちは。維持保守Gの中村です。先週の予告通り今日は「コネクタを繋がずに作業者を動作させる方法」について説明します。 Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで荷物の搬送ができることを説明してきました。 が、コネクタを繋がなくても動作させることができます。 その設定方法について説明します。
2017/10/18
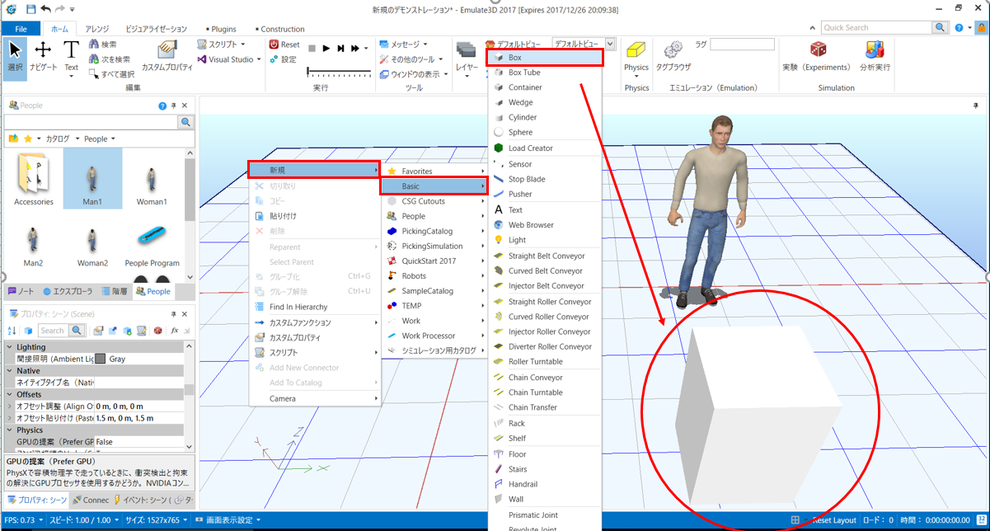
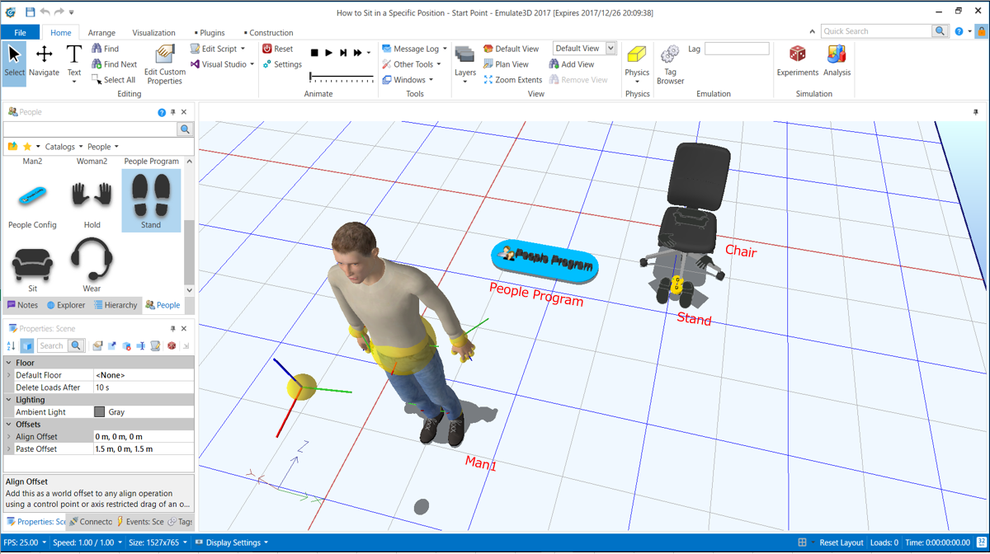
こんにちは。維持保守Gの中村です。先週の予告通り今日は「ポーズを保存する方法」について説明します。 Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで、歩いたり荷物を持ったりできるよう標準的な動作がデフォルトで設定されていますと前回記載しました。 また、頭や手首・指については手動で調整することができます。
2017/10/12
こんにちは。維持保守Gの中村です。先週の予告通り今日は「ハンドレールを掴む方法」について説明します。 Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで、歩いたり荷物を持ったりできるよう標準的な動作がデフォルトで設定されています。 今回はQLPという機能を使用して動作を付ける方法を説明します。
サイトマップ
イベント
サイト内検索
パートナーおよびメンバー


会社概要
株式会社ITAGE
Demo3D viewerアプリ


