
こんにちは。維持保守Gの中村です。先週の予告通り今日は「作業者から作業者への荷物の手渡し」について説明します。
Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで荷物の搬送ができることを説明してきました。
それは標準で動作するように設定がされているからですが、時には標準通りの動きではダメな場合があります。
今回は作業者間で荷物を手渡しする設定を例に動作をへ閻行する方法を説明します。
1.はじめに
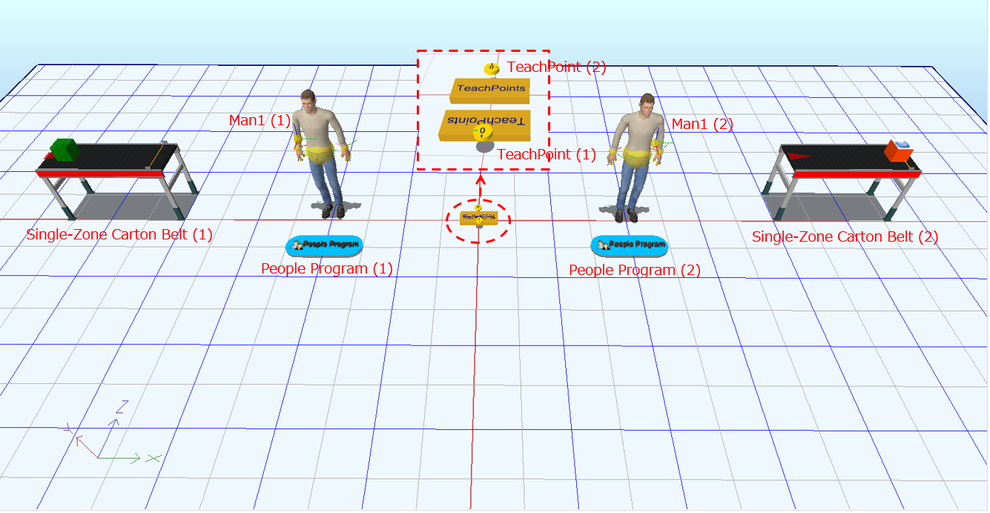
今回使用する標準のカタログは下記の2つです。
- 作業者 : People > Man1 (×2), People Program (×2)
- コンベヤ : QuickStart > Carton Systems > Single-Zone Carton Belt (×2)
- 手渡す場所 : QuickStart > Robot > TeachPoint (×2)
- 荷物を消す : QuickStart > Loads > LoadDeleter
2.設定
以下の順に設定していきます。
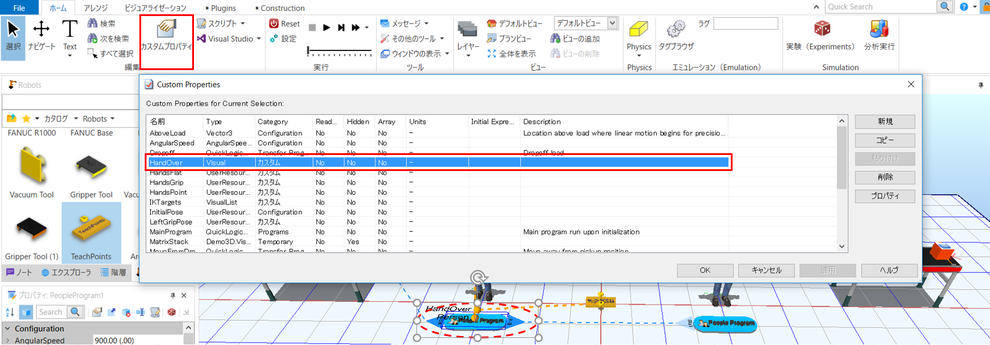
①手渡す側の[People Program]にカスタムプロパティ”HandOver”(Type=Visual)を追加します。
②受ける側も[People Program]にカスタムプロパティ”Receive”(Type=Visual)を追加します。
※プロパティ名については特に制約はありません。
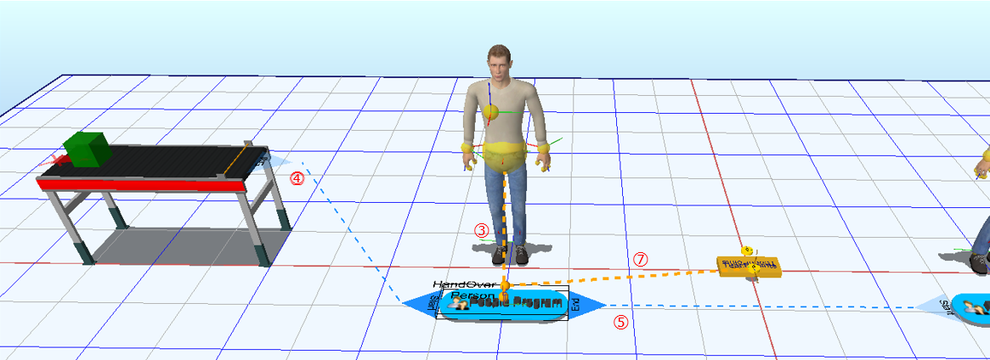
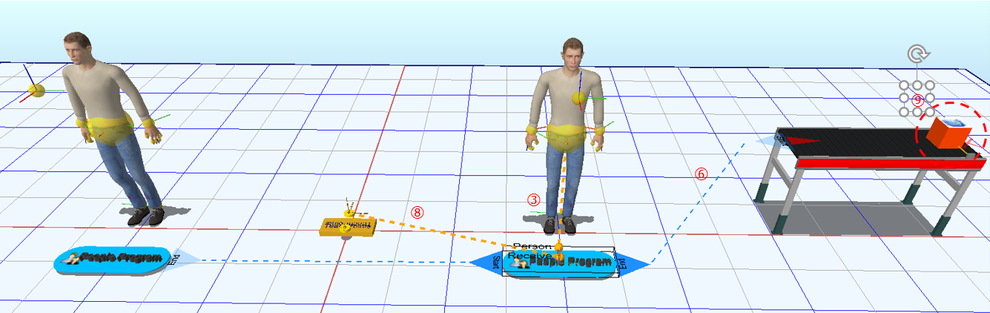
③それぞれの[Man1]と[People Program]を接続します。
⓸出庫側の[Single-Zone Carton Belt]のEndコネクタと手渡す側の[People Program]のStartコネクタを接続します。
⑤手渡す側の[People Program]のEndコネクタと受ける側の[People Program]のStartコネクタを接続します。
⑥受ける側の[People Program]のEndコネクタと入庫側の[Single-Zone Carton Belt]のStartコネクタを接続します。
⑦①で追加したカスタムプロパティ"HandOver"とTeachPoint(下側)を接続します。
⑧②で追加したカスタムプロパティ"Receive"とTeachPoint(上側)を接続します。
⑨入庫側の[Single-Zone Carton Belt]に[Load Deleter]を配置します。
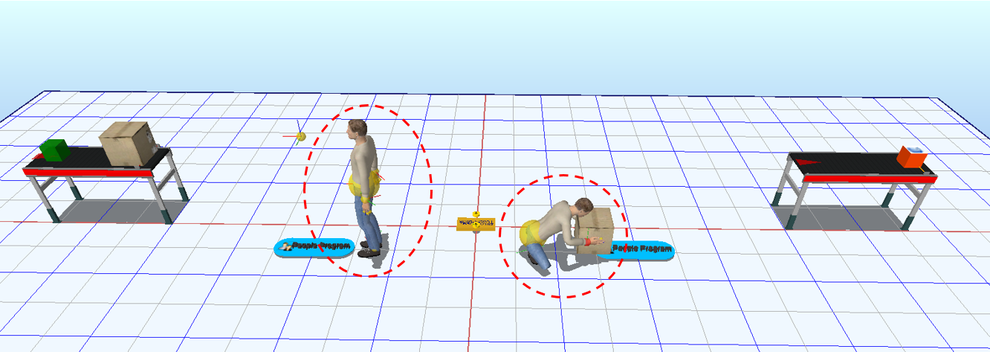
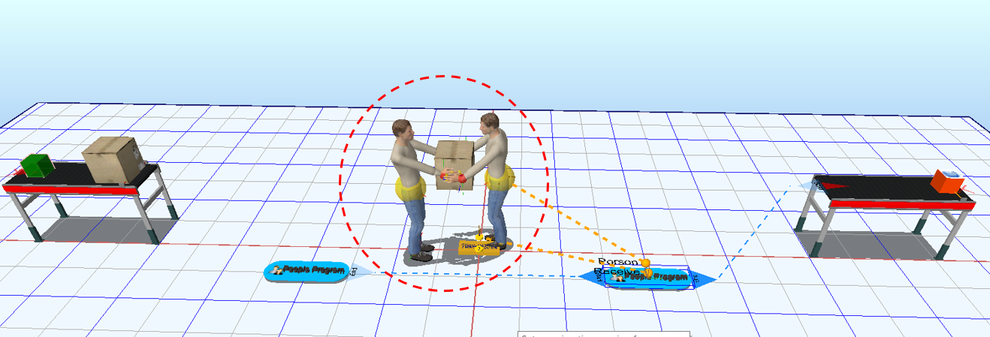
この状態で動かしてみると、
- 手渡す側の作業者は受ける側の[People Program]のStartコネクタ
- 受ける側の作業者は手渡す側の[People Program]のEndコネクタ
に向かって移動してしまいます。
これはコネクタが接続されているためなので、QLPを設定することで手渡す場所へ移動するよう変更します。
3.QLPの設定
以下のように設定ていきます。
①手渡す側が荷物を持って手渡しする位置(下側の[TeachPoint])まで移動させる。
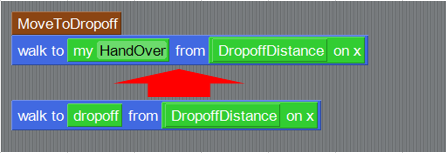
プロパティ"MoveToDropoff"のQLPで指定している行き先を上記で設定したカスタムプロパティ"HandOver"に変更します。
※"HandOver"=下側の[TeachPoint]
②受ける側が荷物を受け釣るまで荷物を持ったままの状態で待つ。
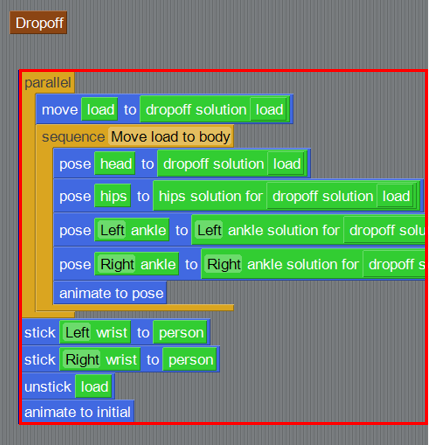
プロパティ"Dropoff"の標準のままだと、下側の[TeachPoint]まで移動した後、しゃがんで荷物を置く動作になっているが、手渡しの場合は、そのままの体制で渡せばいいため、標準のロジックを全て外します。
③渡した後、次の荷物を取りに行く体制をイニシャルの姿勢に戻します。
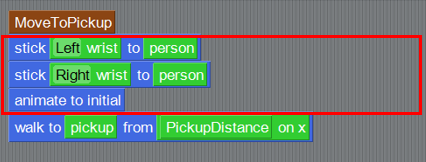
標準ではプロパティ"Dropoff"で荷物を置いた後にイニシャルの姿勢に戻していますが、今回の場合は、受ける側が荷物を持った後にイニシャルの姿勢に戻す必要がありますので、次の荷物を取りに行くためのプロパティ"MoveToPickup"の最初にてイニシャルの姿勢に戻すよう、左の赤枠3行を追加します、
⓸受ける側が荷物を手渡しする位置(上側の[TeachPoint])まで移動させる。
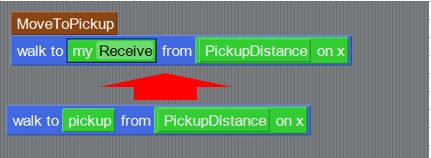
プロパティ"MoveToPickup"のQLPで指定している行き先を上記で設定したカスタムプロパティ"Receive"に変更します。
※"Receive"=上側の[TeachPoint]
以上で作業者から作業者への手渡しが可能となります。
次回の火曜は「作業者から作業者への荷物の手渡し」について紹介致します。





コメントをお書きください