
こんにちは。維持保守Gの中村です。「ロボットの基本パレタイズモデル」について説明します。
コンベヤを流れてくる荷物をロボットがパレタイズする基本的なモデルの作成方法です。
標準的な動きであればコネクタを繋ぐだけで簡単にできます。
また、パレットに置く数量や段数も簡単に設定することができます。
1.はじめに
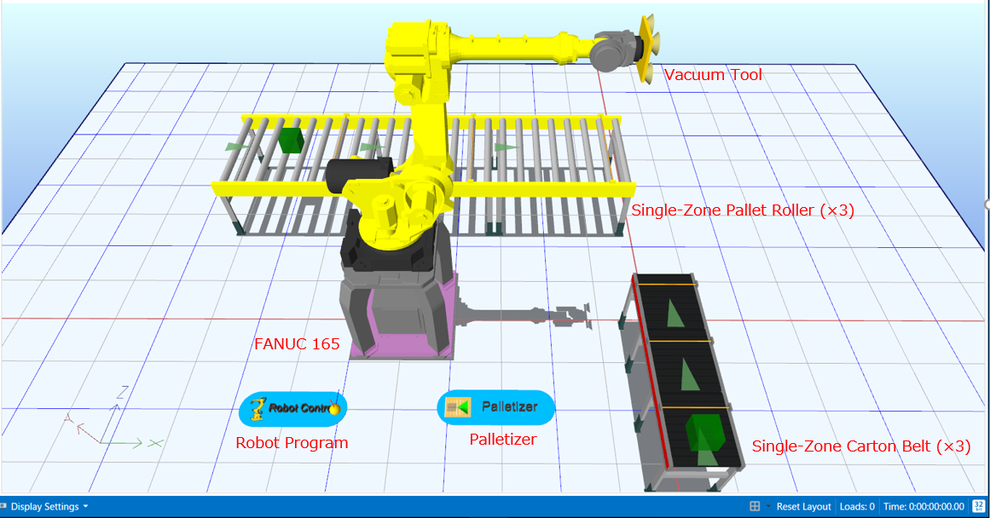
今回使用する標準カタログは以下です。
- コンベヤ(パレット): QuickStart > Pallet Systems > Single-Zone Pallet Roller
- コンベヤ(荷物用) : QuickStart > Carton Systems > Single-Zone Carton Belt
- パレタイザー : QuickStart > Controllers > Palletizer
- ロボット : Robots > FANUC 165
- バキュームツール : Robots > Vacuum Tool
- ロボットプログラム : Robots > Robot Program
(注意)
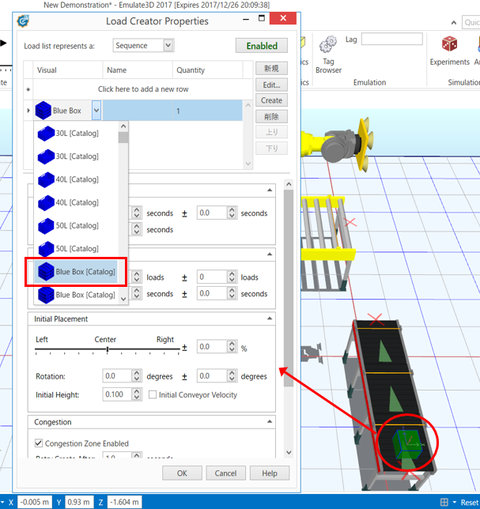
- Load Creatorは最初に配置したコンベヤについていますので、もう一方のコンベヤにコピーし荷物の種類を変更します。
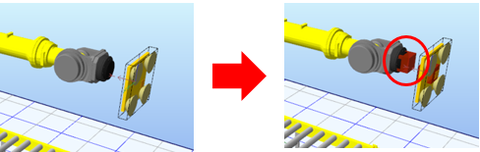
- Vacuum ToolはrRobotの接続する部分に位置を合わせ近づけると、赤い接続部分が表示され自動でセットされます。
2.カタログの設定
では個々のカタログの設定を行います。
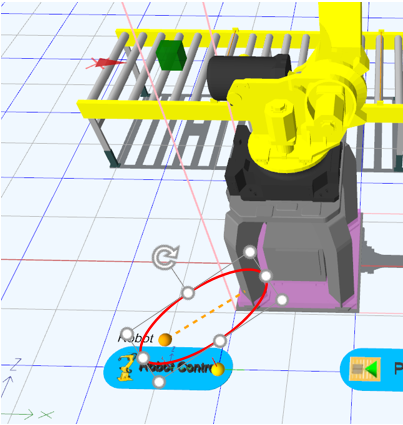
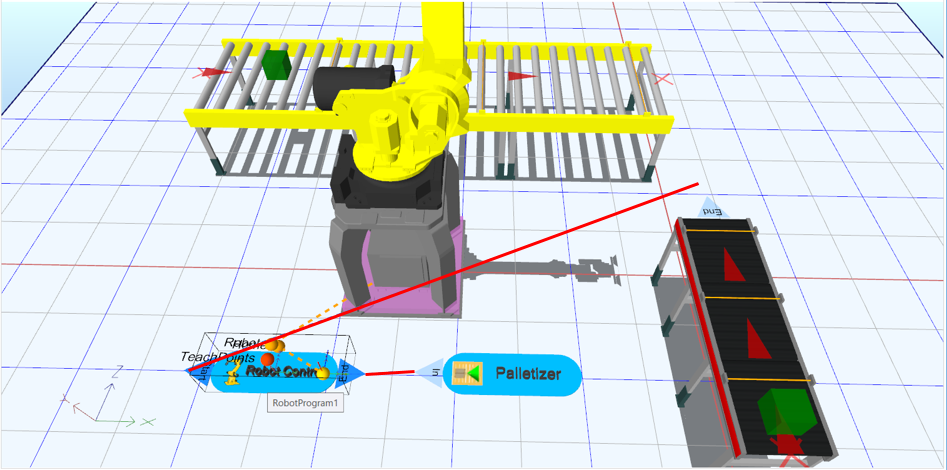
①RobotとRobot Programを接続します。
②Palletizerの'Listening To'とパレタイズするコンベヤを接続します。
※今回はSingle-Zone Pallet Rollerの真ん中でパレタイズします。
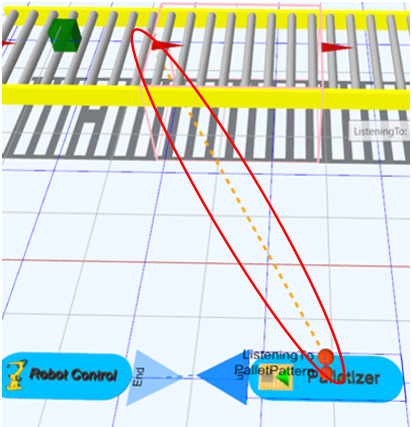
③Single-Zone Carton BeltのEndコネクタとPobot ProgramのStartコネクタ、Pobot ProgramのEndコネクタとPalletizerのInコネクタを接続します。
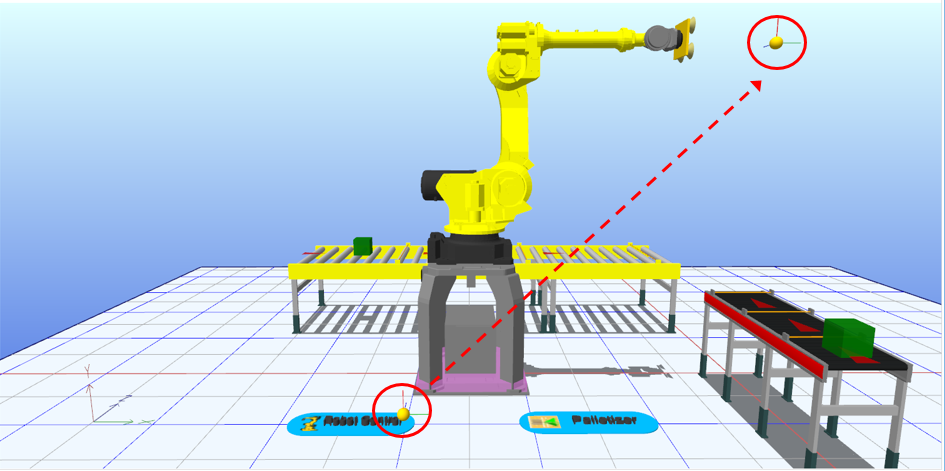
⓸Robotが動き出すあ際のHomeポジションが設定します。
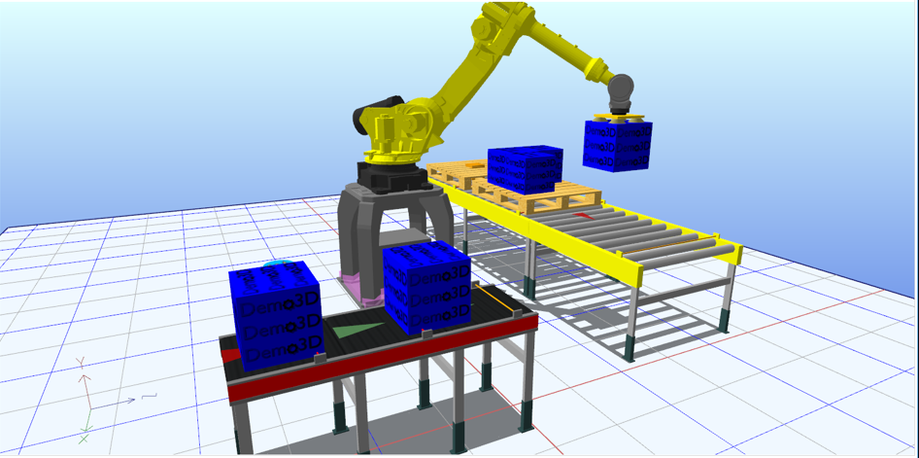
3.動作の確認
設定は完了しましたので動作を確認します。





コメントをお書きください