
こんにちは。維持保守Gの中村です。先週の予告通り今日は「ポーズを保存する方法」について説明します。
Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで、歩いたり荷物を持ったりできるよう標準的な動作がデフォルトで設定されていますと前回記載しました。
また、頭や手首・指については手動で調整することができます。
1.はじめに
先ずはデフォルトのモデルとして人が椅子に座るモデルを作成します。使用するカタログは以下です。
- 人 : People > Man1, People > People Program
- 椅子 : People > Accessories > Chair
- 立ち位置 : People > Stand
2.カタログの配置
以下のように配置します。
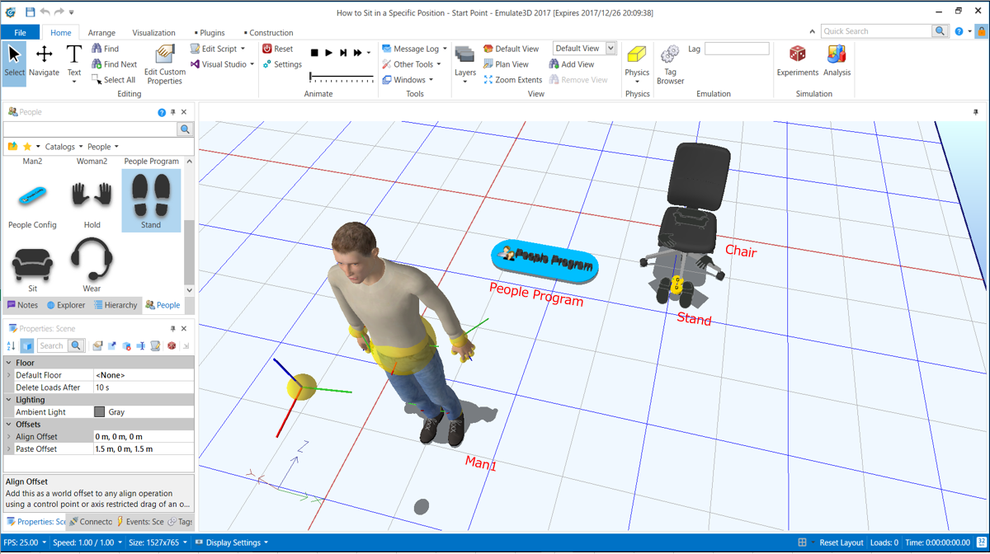
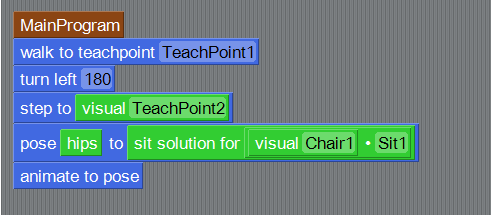
[People Program]と[Man1]を接続します。そして[People Program]の"MainProgram"に
- [Stand] ("TeachPoint1")に移動します。
- 180度回転させます。
- [Stand] ("TeachPoint2")にステップします。
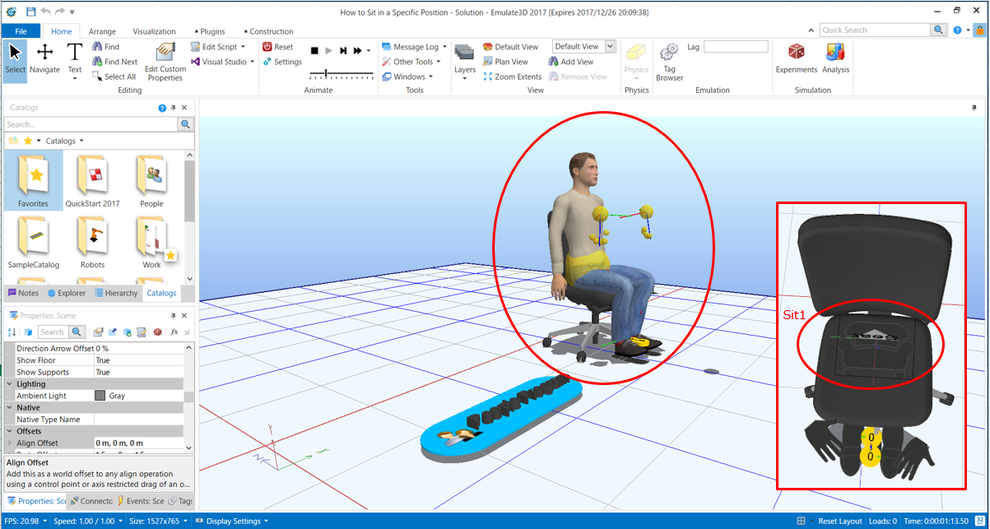
- 腰の位置を[Chair] (”Chair1")の"Sit1"に合わせます。(座る動作は"Sit Solution"ウィジェットで定義されています)
- ポーズをアニメーション化します。
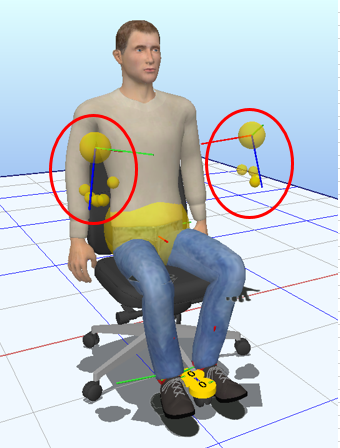
3.手首の調整
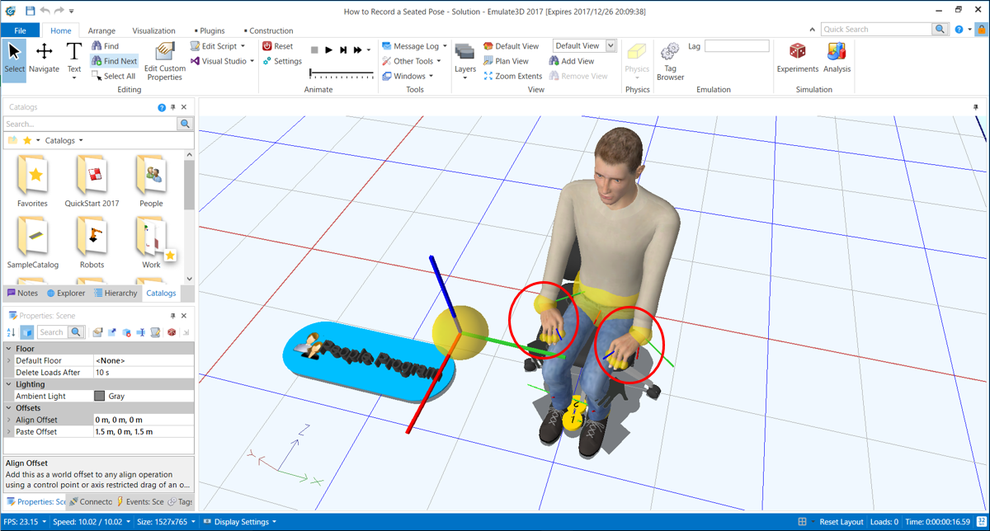
両手を太ももの上に置くよう調整します。
まず、以下の画像の通り、[Man1]の手首と指の[TeachPoint]の位置がずれているのがわかります。
現在の手首・指の位置に合わせるため[People Program]の"Custom Fanctions"の'Reset Targets'をクリックし、[TeachPoint]のターゲットをリセットします。
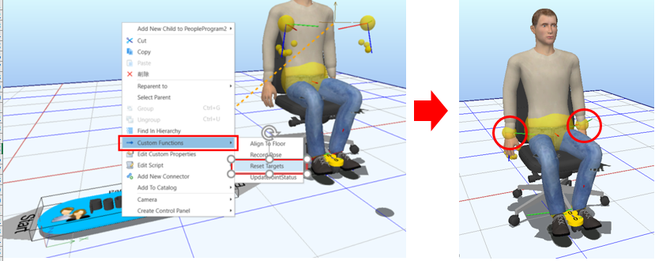
両手首の[TeachPoint]をドラッグし膝の上でドロップし指を含め微調整します。
※すべての微調整が終わるまでResetしないでください。(微調整の結果がリセットされてしまいます。)
3.ポーズの保存
[People Program]の"Custom Fanctions"の'Record Pose'をクリックすると、保存する名称を入力するウインドウが表示されますので任意の名前で保存します。
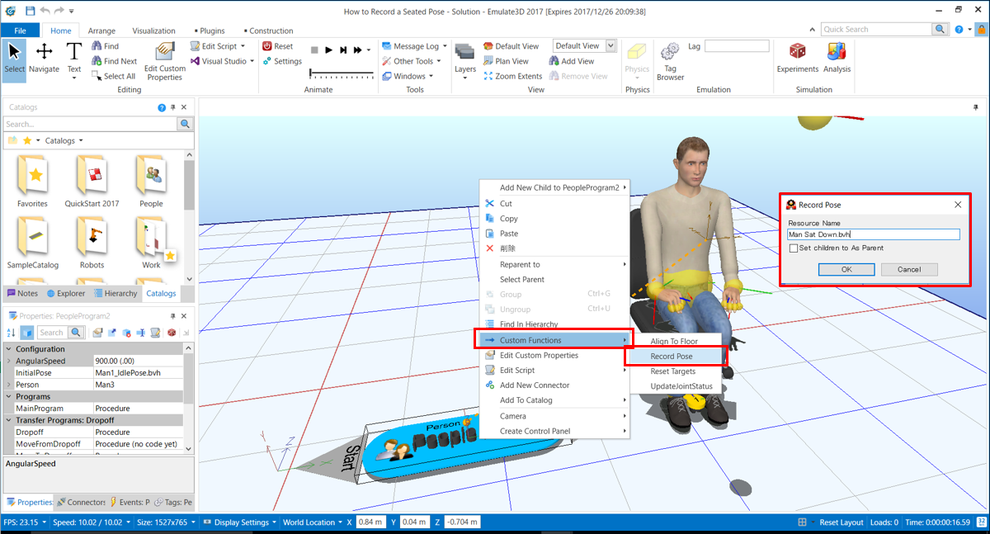
[Resource Explorer]に保存されます。

4.QLPを変更し実行
QLPを保存したポーズを使用するように変更します。

これで座った時の両手の位置が太ももの上に置かれます。
何かありましたらお気軽にお問い合わせ、コメントください。
次回の木曜日はDemo3Dの「作業者が時搬送物を持つ手の位置の調整」について紹介致します。





コメントをお書きください