
こんにちは。維持保守Gの中村です。先週の予告通り今日は「ハンドレールを掴む方法」について説明します。
Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで、歩いたり荷物を持ったりできるよう標準的な動作がデフォルトで設定されています。
今回はQLPという機能を使用して動作を付ける方法を説明します。
1.はじめに
使用するカタログは以下です。
- ハンドレール : QuickStart > Buildings > Handrail
- 人 : People > Man1, People > People Program
- 椅子 : People > Accessories > Chair
- 立ち位置 : People > Stand
- 掴む位置 : Hold (2つ)
2.カタログの配置
以下のように配置します。
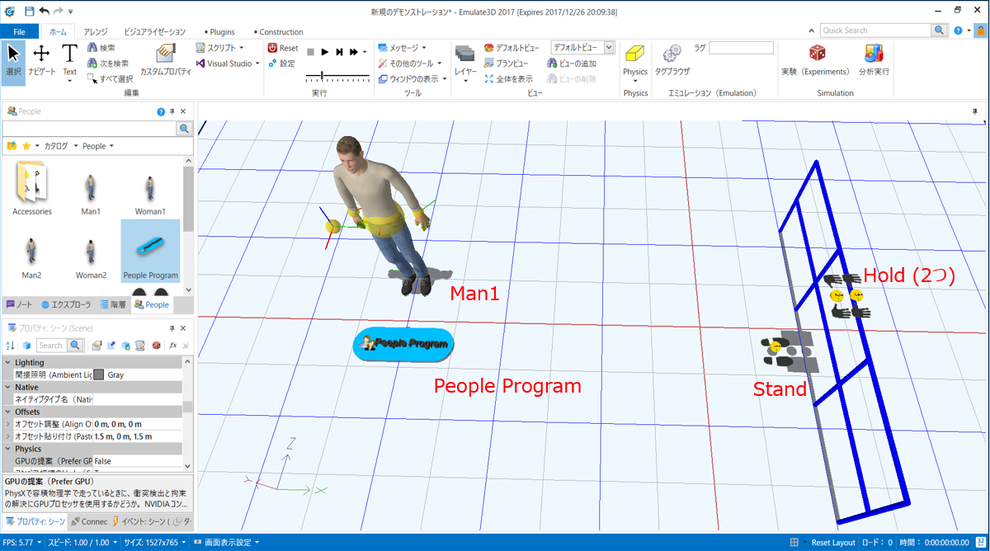
[People Program]と[Man1]を接続します。

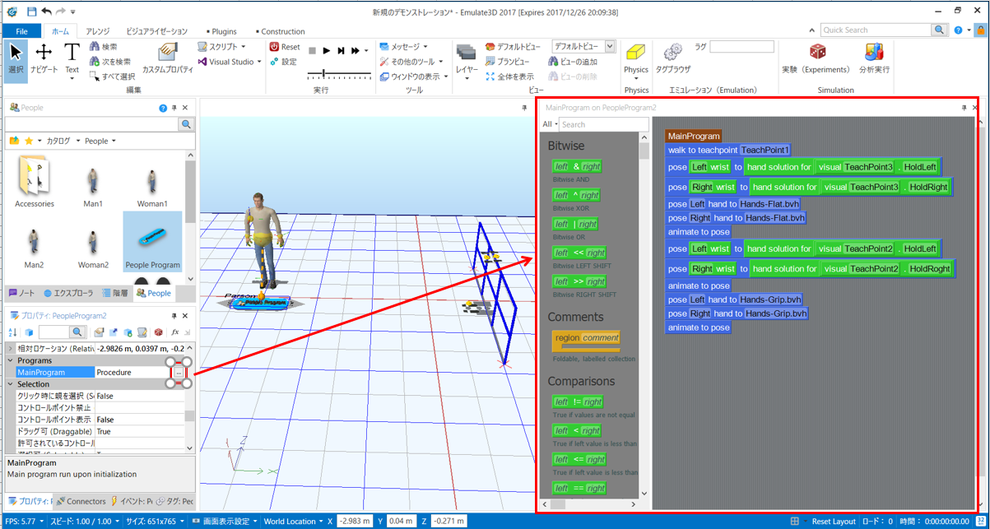
QLPを設定します。(下記画像の順に記載します。)
- Stand (TeachPoint1)まで移動します。
- 左手をHold (TeachPint2)の左手側(HoldLeft)にのせます。
- 右手をHold (TeachPint2)の右手側(HoldRight)にのせます。
- 標準で保存されているモーションキャプチャ(Hands-Flat.bvh)で左手を固定します。
- 標準で保存されているモーションキャプチャ(Hands-Flat.bvh)で右手を固定します。
- 上記2~5をのポーズをアニメーション化します。
- 左手をHold (TeachPint3)の左手側(HoldLeft)にのせます。
- 右手をHold (TeachPint3)の右手側(HoldRight)にのせます。
- 上記7~8をのポーズをアニメーション化します。
- 標準で保存されているモーションキャプチャ(Hands-Glip.bvh)で左手を固定します。
- 標準で保存されているモーションキャプチャ(Hands-Glip.bvh)で右手を固定します。
- 上記10~11をのポーズをアニメーション化します。
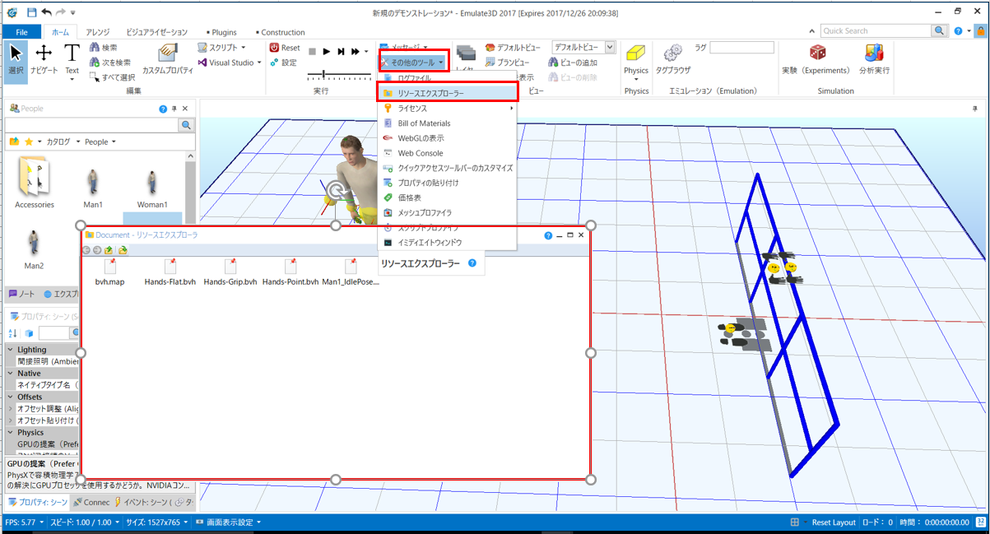
(モーションキャプチャの選択方法)
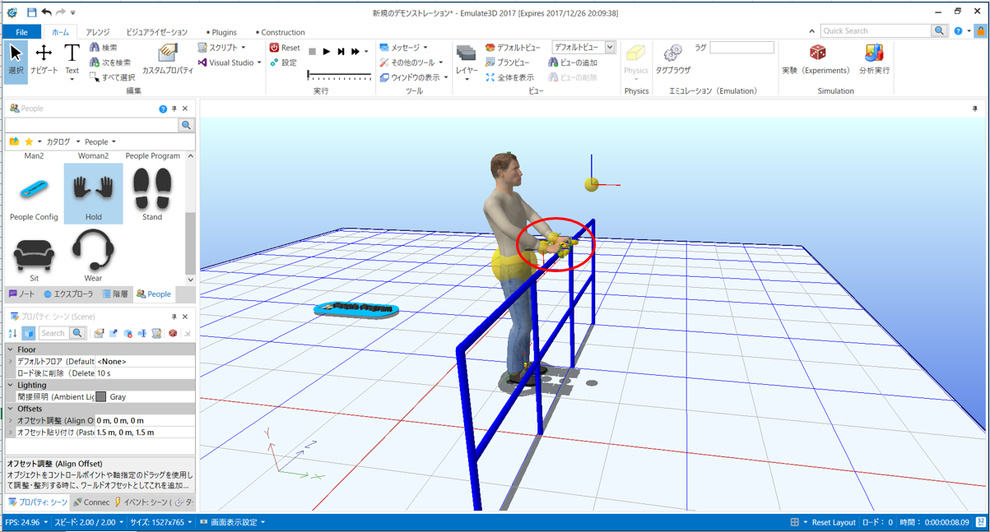
3.実行
[Reset]後、[Start]にて実行します。
ハンドレールを握ることが確認できます。握る位置の調整が必要な場合については次回「ポーズを保存する方法」にて説明します。
何かありましたらお気軽にお問い合わせ、コメントください。
次回の木曜日はDemo3Dの「ポーズを保存する方法」について紹介致します。





コメントをお書きください