
こんにちは。維持保守Gの中村です。「ロボット台の作成」について説明します。
標準カタログでもKUKA製には台がついていません。
また、ロボットのCADデータを取り込んだ場合も台が付いていません。
そんな場合の簡易的に台を作成し取付ける方法を説明します。
1.はじめに
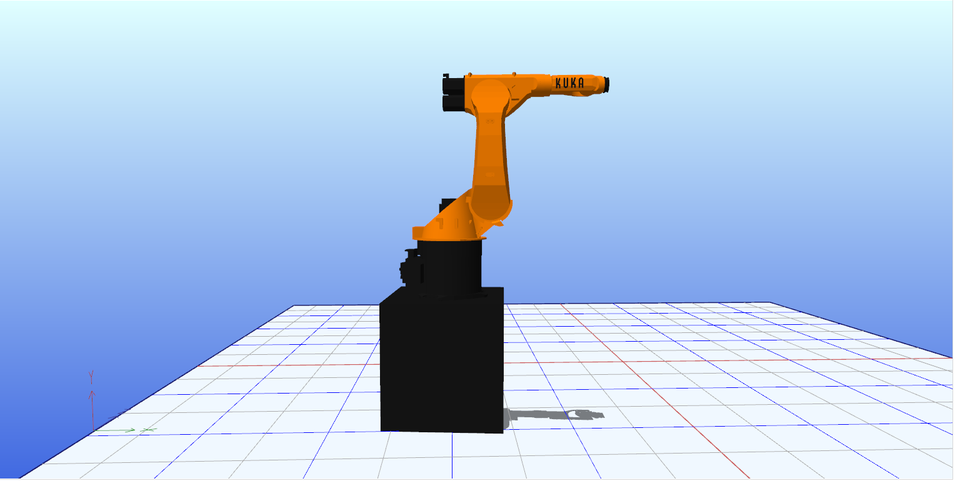
では標準カタログからKUKA KR60のロボットに台を設定します。
2.台の作成
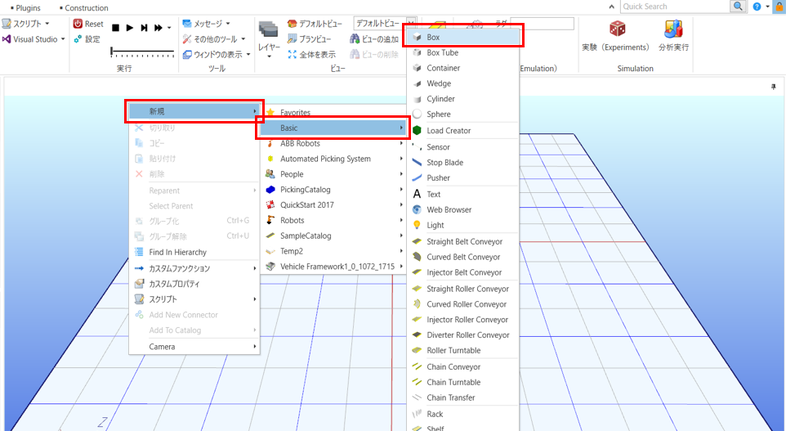
Boxを使用して台を作成します。
① シーンを右クリックし[新規] > [Basic] > [Box]を選択します。
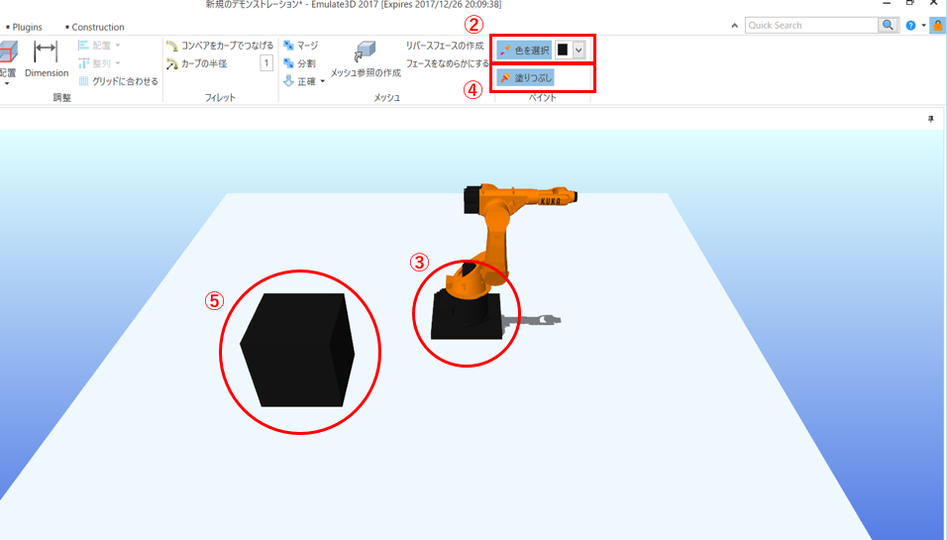
② 「アレンジ」タブの[色を選択]ボタンをクリックします。カーソルがピペットの形に変わります。
③ KUKA KR60の下部の小さな台の部分を選択すると色を検出します。検出された色は[色を選択]の横に表示されます。
④ [塗りつぶし]ボタンをクリックします。カーソルが塗りつぶしモードに変わります。
⑤Boxをクリックします。Boxが③と同じ色に塗りつぶされます。
※再度[塗りつぶし]ボタンをクリックするとカーソルが元のモードに戻ります。
3.ロボットの設置
作成した台の上にロボットを設置します。
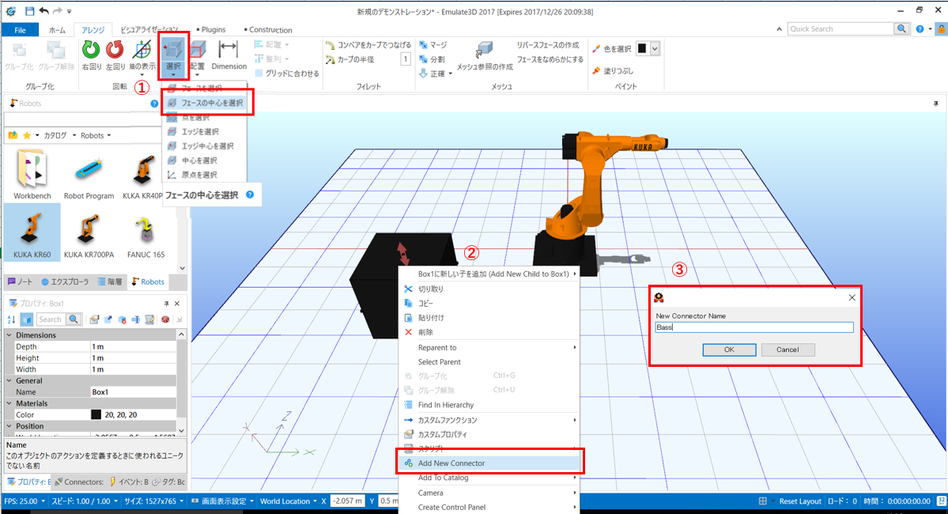
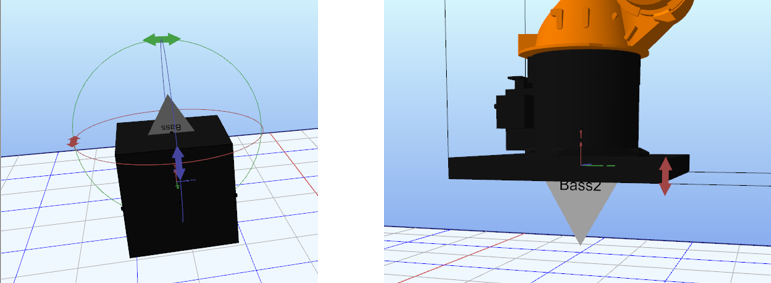
1.Boxの上面の中心にコネクターを設定します。
①「アレンジ」タブの[選択] > [フェースの中心を選択]をクリックします。
② Boxの上面をクリックします。
③ Boxを右クリックし[Add New connector]を選択し、任意の名前を付けます。
※KUKA KR60の下部の小さな台の部分にも同様にコネクターを設定します。
以下の画像のように両方にコネクターが設定されます。
2.作成した台とロボットを接続します。
但し、この状態では同期した配置の移動ができません。
3.同期して移動するように設定します。
① 作成した台のコネクターをクリックしプロファイル[リペアレントの接続(ReparentOnConnect)]の値を"Ture"に変更します。
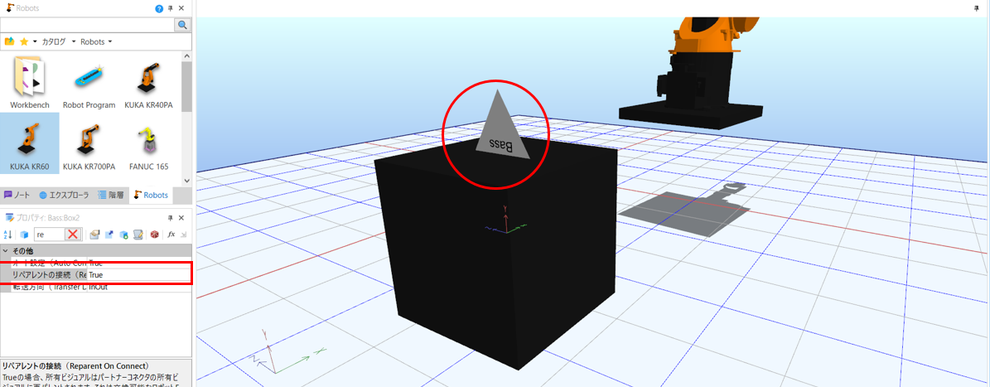
この設定で台がロボットの子になるため、ロボットを移動すると台も同期して移動します。
但し、この設定だけでは台を移動するとロボットは同期しません、
② 作成した台をクリックし、プロファイル[クリック時に親を選択(Select Parent When Picked)]の値を"Ture"に変更します。
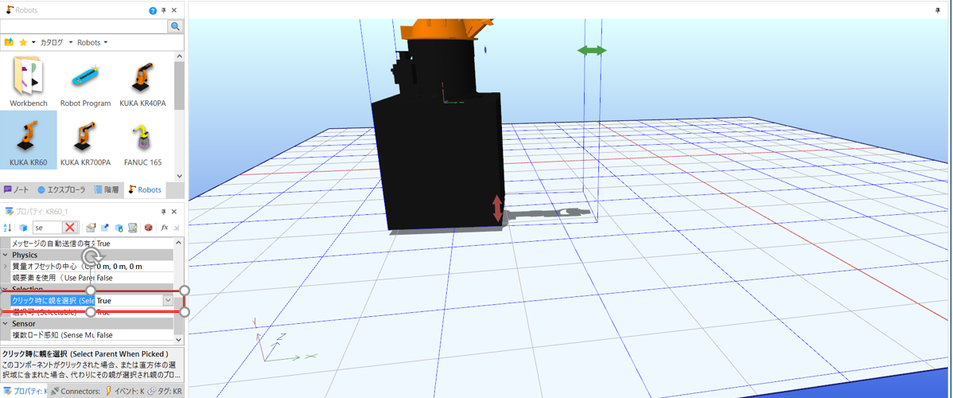
この設定で作成した台、ロボットのどちらを選択し配置移動して同期して移動します。。





コメントをお書きください