
こんにちは。維持保守Gの中村です。先週の予告通り今日は「作業者が時搬送物を持つ手の位置の調整」について説明します。
Demo3Dの人のカタログは、コンベヤやラックなどとコネクタを接続するだけで荷物の側面の下側を保持します。
今回は保持する高さや前後の位置を調整します。
1.はじめに
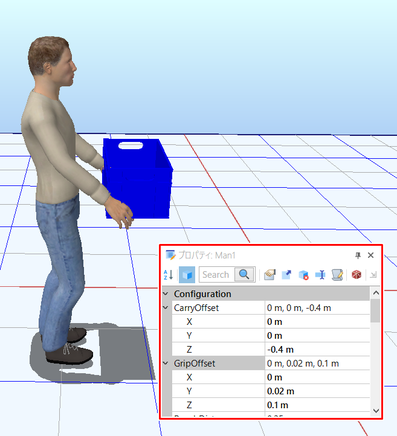
作業者[Man1]の荷物を保持する手の位置に関するプロパティを説明します。
- CarryOffset : 荷物を保持する高さ
- GripOffset : 荷物を保持する位置
双方ともにY軸(手の上下)Z軸(手の前後)が調整できます。(プロファイル上X軸もありますが変更できません。)
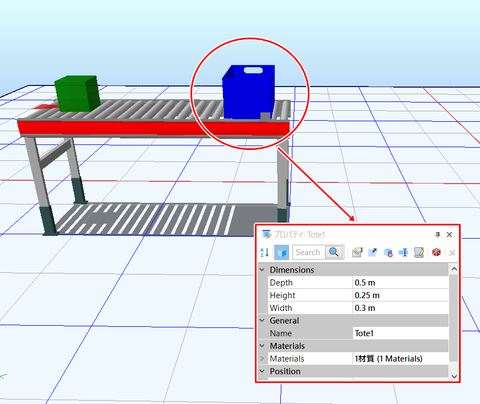
今回の説明では、Depth(奥行き)=0.5m, Height(高さ)=0.25m, Width(幅)=0.3m のTore boxを持つ場合を例としています。
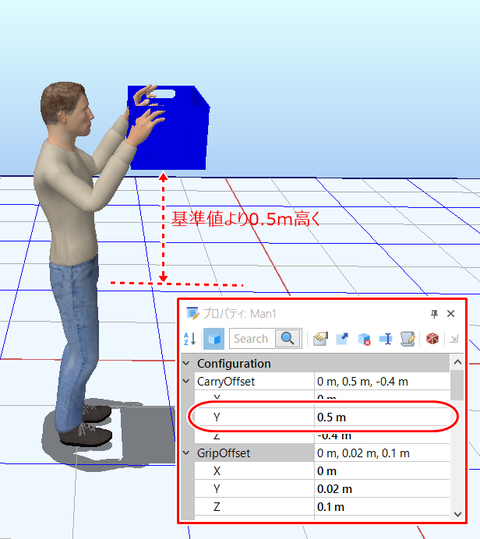
2.保持する手の高さを設定
プロファイル[CarryOffset]
- X : 変更できません。
- Y : 荷物を保持する基準値からの高さ位置を設定
- Z : 荷物を保持する基準値からの前後位置を設定
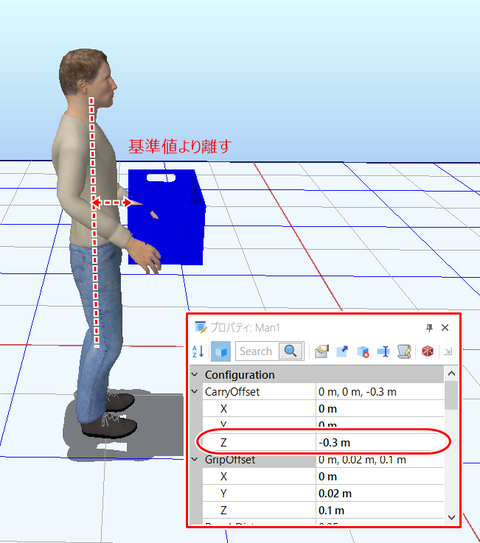
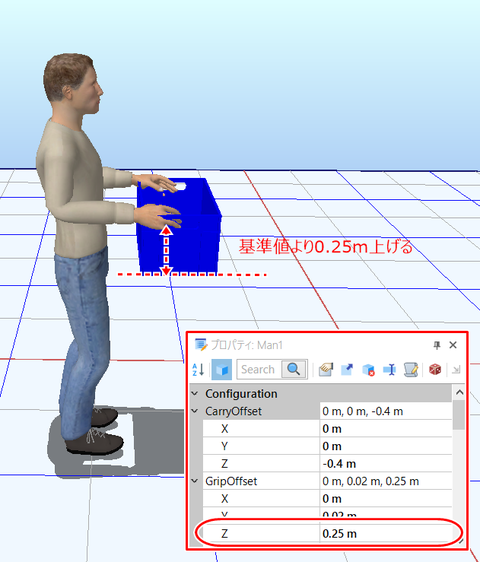
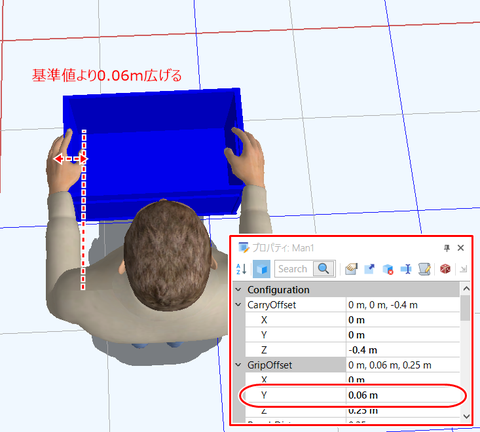
3.保持する手の位置を設定
プロファイル[GripOffset]
- X : 変更できません。
- Y : 荷物を保持する両手の間隔を設定
- Z : 荷物を保持する手の位置を設定
更に詳細に手首や指を調整する場合は、前回説明したTeachPointを手動で調整してください。
何かありましたらお気軽にお問い合わせ、コメントください。
次回の木曜日はDemo3Dの「コネクタを繋がずに作業者を動作させる方法」について紹介致します。





コメントをお書きください