
こんにちは。維持保守Gの中村です。昨年の11月30日に「ロボットの基本パレタイズモデルの作成」について説明しましたが、今回はその逆のパターン「ロボットの基本デパレタイズモデルの作成」について説明します。
コンベヤを流れてくるパレット上の荷物をロボットがデパレタイズする基本的なモデルの作成方法です。
標準的な動きであればコネクタを繋ぐだけで簡単にできます。
1.はじめに
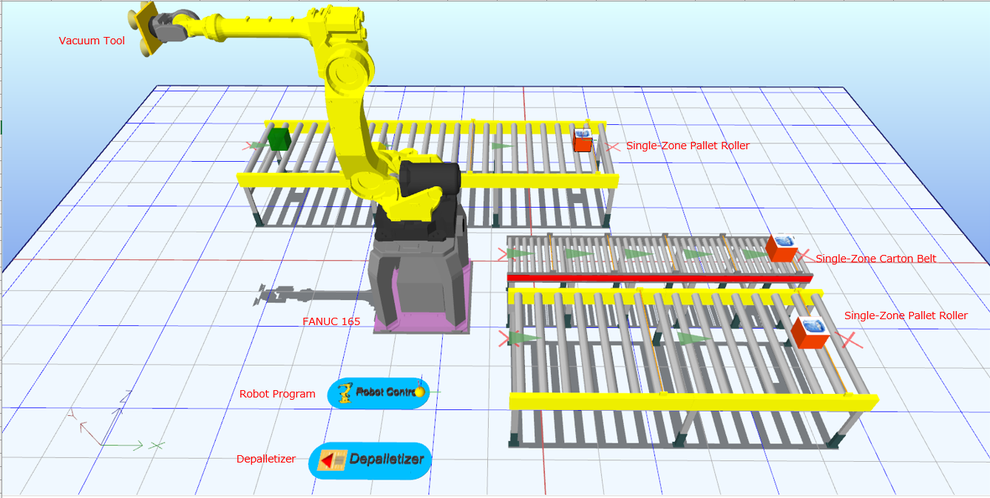
今回使用する標準カタログは以下です。
- コンベヤ(パレット): QuickStart > Pallet Systems > Single-Zone Pallet Roller
- コンベヤ(荷物用) : QuickStart > Carton Systems > Single-Zone Carton Belt
- デパレタイザー : QuickStart > Controllers > Depalletizer
- ロボット : Robots > FANUC 165
- バキュームツール : Robots > Vacuum Tool
- ロボットプログラム : Robots > Robot Program
2.カタログの設定
では個々のカタログの設定を行います。
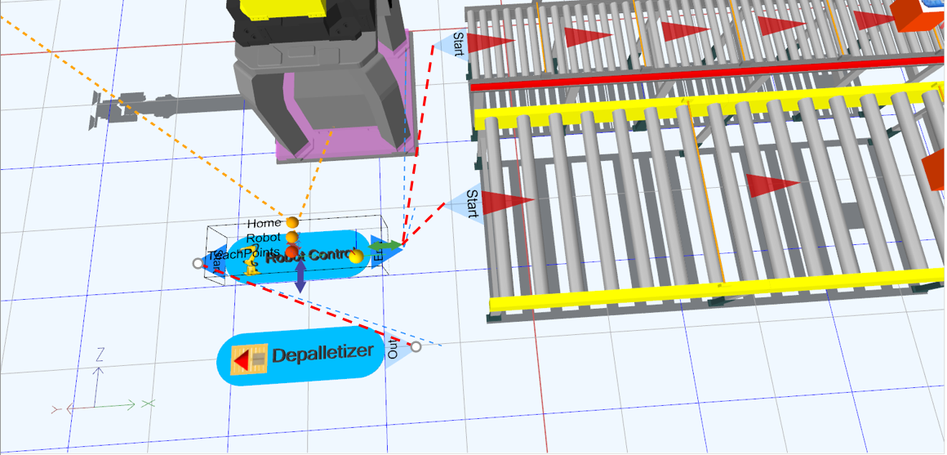
①RobotとRobot Programを接続します。

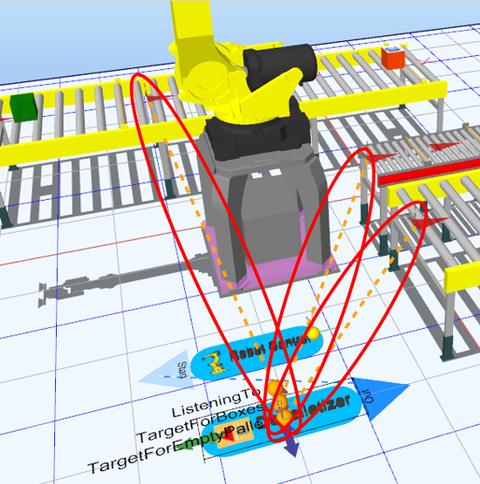
③Depalletizerの'Listening To'とデパレタイズするコンベヤを接続します。
④Depalletizerの’TagetForBoxes’とデパレタイズ後のBoxの搬送先コンベヤを接続します。
⑤Depalletizerの’TagetForEmptyPallet’と空きのパレットの搬送先コンベヤを接続します。
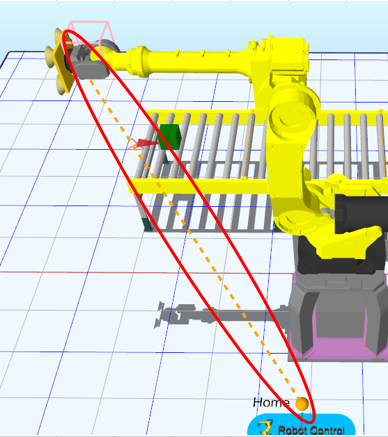
②RobotのHomeポジションを設定します
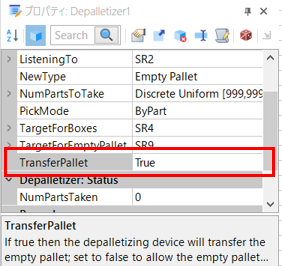
⑥Depalletizerの”TransferPallet”プロパティの値を’True’に変更します。※’False’だと最初の1パレット分のデパレタイズが終わるとRobotが止まります。
⑦Robot ProgramのStartコネクタとDepalletizerのOutコネクタ、Pobot ProgramのEndコネクタと搬送先のSingle-Zone Pallet Roller、Single-Zone Carton BeltそれぞれのStartコネクタを接続します。
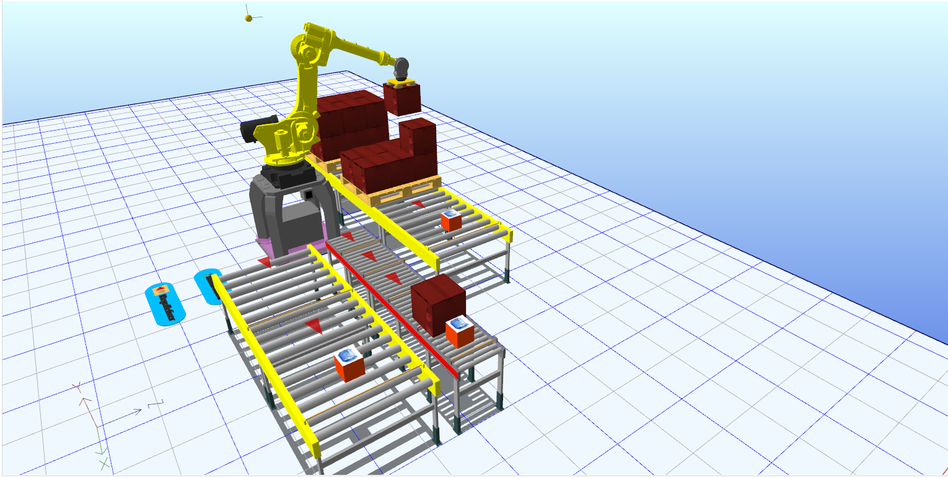
3.動作の確認
設定は完了しましたので動作を確認します。





コメントをお書きください