
こんにちは。渡邊です。
今日は、AGVの動作についてのトピックスです。
AGVのお話になると必ず聞かれる動作「横行・スピンターンは出来ますか?どうやって設定しますか?」
について、ご説明致します。
「横行」については、これまで動作や設定に苦しい所があり、ユーザー様にはご迷惑をおかけしていましたが、
今回はそれが解消しています。
最後までお付き合いお願い致します。
AGV 横行の経路設定
これまで、ユーザー様には直線(2-Way Track)と直線(2-Way Track)を直接繋ぐ事が出来ませんとご説明してきました。
理由は直線同士を直角接続をしようとすると、どちらかの直線(2-Way Track)にX軸あるいはZ軸が自動的に座標が補正されてしまうからです。
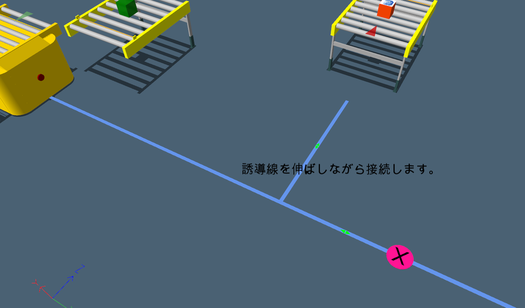
しかし、ある手順を踏む事で直線(2-Way Track)同士を直角接続する事が出来ます。
Point) 直線を伸ばしながら接続する事で、直角接続が可能となります。
すみません。知りませんでした。
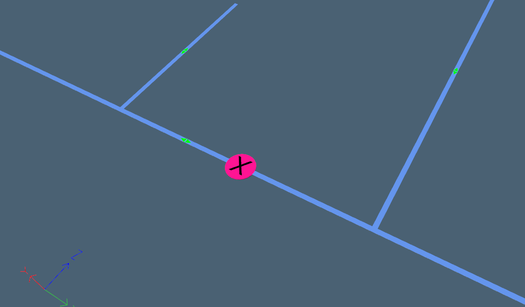
その状態でAGVを走行させると直角接続している誘導線へは、横行して移動します。
AGV スピンターン
スピンターンについては簡単です。
下記よりダウンロード出来ますカタログに「VehicleTurnPoint」が御座いますので、誘導線上のスピンターンさせたい位置に配置してください。
主要なパラメータ
RotationDegree : スピンターンする角度
RotationSpeed:スピンターンする速さ
下記より、AGV 横行とスピンターンの動作が確認出来ます。

本トピックで利用したカタログとモデルは下記よりダウンロードお願いします。
→ AGV_SideWalk_SpinTurn(demo3d).zip
→ AGV_QuickStart(demo3dcatalog).zip
次回の渡邊のトピックでは「VehicleManager」の仕様説明と、配車割当を変更する際の変更ポイントについてご説明致します。





コメントをお書きください